파이브앤하프(Five and a Half System)는 당구에서 가장 대중적으로 잘 알려져 있는 시스템이며, 활용도가 매우 높은 시스템입니다.
내 공의 위치에 따라서 약간의 회전의 조절이 필요한 시스템으로 습득하는데 약간의 어려움이 있습니다.
해외에서는 다이아몬드 시스템(Diamond System)이라고 불리기도 합니다.
사용법
계산식
아래의 그림은 파이브앤하프 시스템의 가장 기본이 되는 기준라인입니다.
기본 계산식은 아래와 같습니다.

위의 계산식에 의해서 위 그림은 20 = 50 - 30와 같이 계산이 됩니다.
포인트
아래의 그림은 파이브앤하프시스템의 출발값, 1쿠션값, 3쿠션값에 해당하는 포인트 숫자입니다. 내 공이 오른쪽에서 출발해서 위쪽 장쿠션을 맞추는 기준으로 작성되었습니다.
출발값
- 테이블 포인트를 사용합니다.
- 긴 테이블은 2개의 포인트마다 10씩 증가합니다.
- 짧은 테이블은 1개의 포인트마다 10씩 증가하며, 70이상부터 반 포인트마다 10씩 증가합니다.
1쿠션값
- 테이블 포인트를 사용합니다.
- 1포인트마다 10씩 증가합니다.
- 50부터는 반 포인트마다 10씩 증가합니다.
3쿠션값
- 쿠션 포인트를 사용합니다.
- 1포인트마다 10씩 증가합니다.
- 40부터는 반 포인트마다 10씩 증가합니다.
당점, 스트로크의 속도
파이브앤하프 시스템은 가변회전 시스템으로 출발 위치에 따라서 아래의 그림과 같이 기본 당점이 달라집니다.
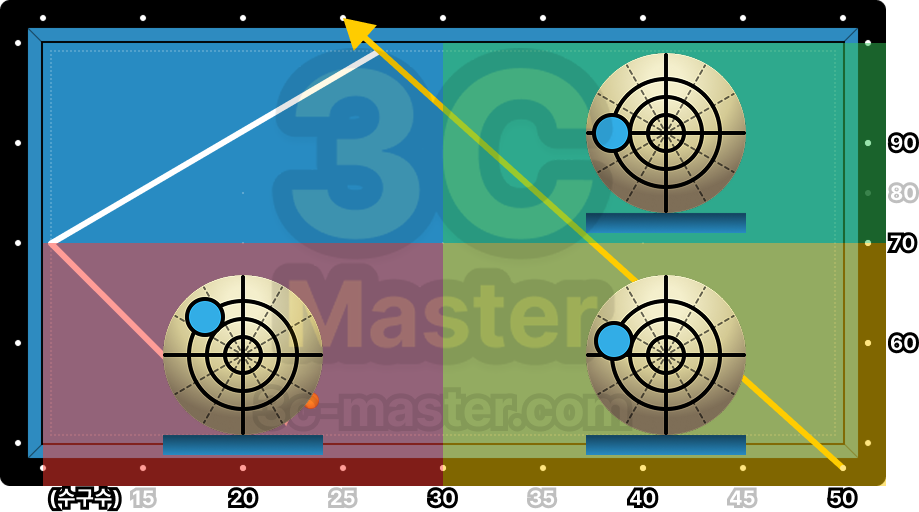
출발 위치가 30이하인 경우
 을 기본 당점으로 사용합니다.
을 기본 당점으로 사용합니다.- 3쿠션의 도착 위치가 10 이하인 경우
 을 사용합니다.
을 사용합니다. - 3쿠션의 도착 위치가 0에 가까워 질수록
 을 사용합니다.
을 사용합니다.
출발 위치가 30 ~ 70인 경우
 을 기본 당점으로 사용합니다.
을 기본 당점으로 사용합니다.- 3쿠션의 도착 위치가 20 이하인 경우 을 사용합니다.
- 평범한 3레일 속도로 샷을 합니다.
출발 위치가 70이상인 경우
- 을 기본 당점으로 사용합니다.
- 3쿠션의 도착 위치가 20 이하인 경우 을 사용합니다.
3레일 속도를 기본 속도로 사용 합니다.
내 공이 1쿠션과 가까운 경우 쿠션의 반발력에 의해서 짧아질 수 있으므로 최대한 부드러운 스트로크를 하거나, 3레일 속도를 유지하고 3쿠션 지점을 좀 더 길게 설계하고 샷을 합니다.
1적구의 두께가 1/2 두께 이상이 되는 경우 내 공의 밀림에 의해서 길어지거나 짧아질 수 있으니, 당점을 조정하거나, 시스템 설계시 수치조정이 필요합니다.
4쿠션
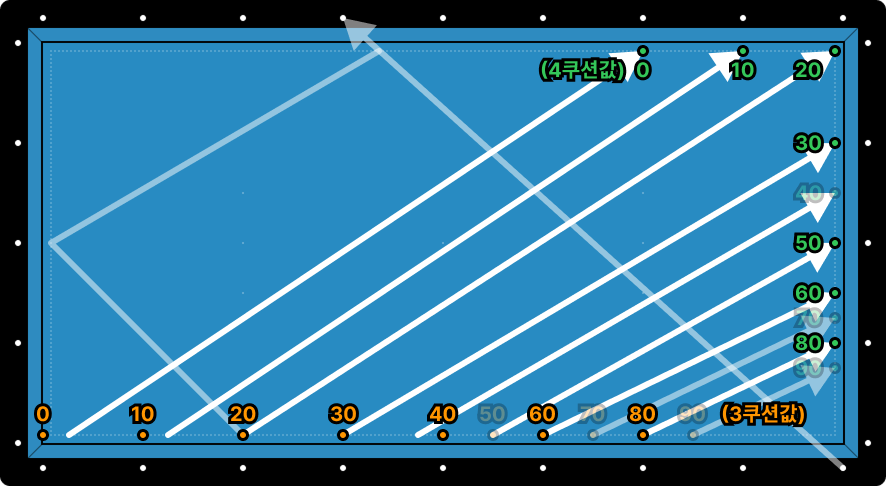
출발값 50을 기준으로 했을 때 4쿠션값은 아래의 그림과 같습니다.
4쿠션 보정
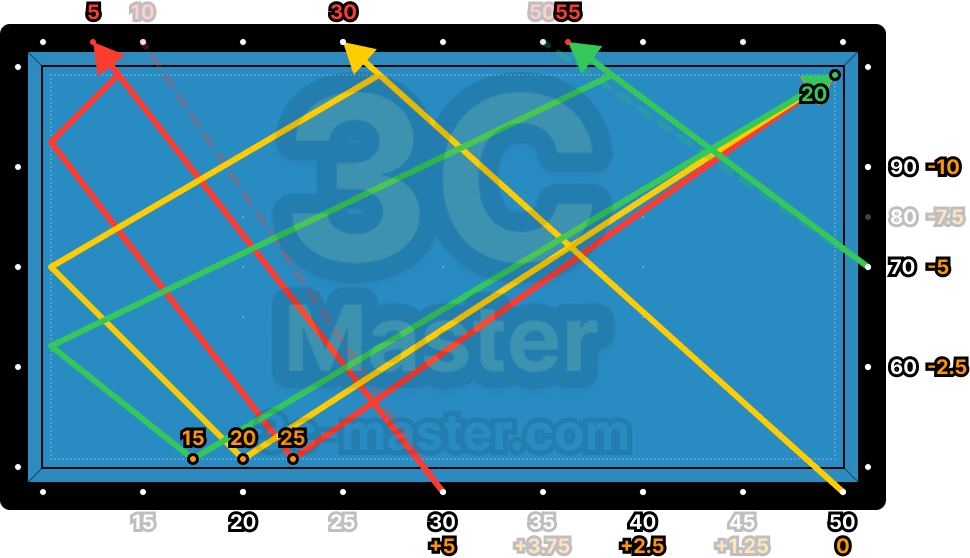
출발값이 50이 아닌 경우 같은 3쿠션을 맞아도 내 공이 도착하는 4쿠션 포인트는 약간의 차이가 나게 됩니다.
출발값에 따른 4쿠션 도착 지점
- 출발값이 50보다 작을 경우, 짧게 도착
- 출발값이 50보다 클 경우, 길게 도착
따라서, 아래의 그림에 출발값 옆에 적힌 보정값만큼 3쿠션 지점에 가감을 해주어야 같은 4쿠션 지점에 도착하게 됩니다.
5, 6쿠션
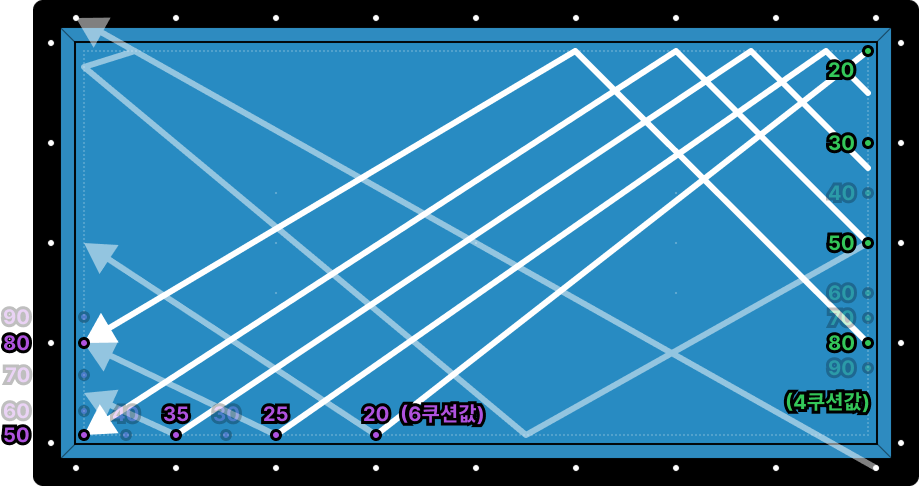
4쿠션에 이어지는 5, 6쿠션값입니다. 5쿠션값은 대략적으로 4쿠션지점의 맞은편 지점으로 기억하면 됩니다.
6쿠션값은 파이브앤하프 시스템을 이용한 대회전에 사용하면 아주 유용하게 사용할 수 있습니다.
응용하기
파이브앤하프 시스템은 여러 형태의 3쿠션에 유용합니다. 아래의 응용하는 방법을 보시고, 실전에 활용해 보세요.
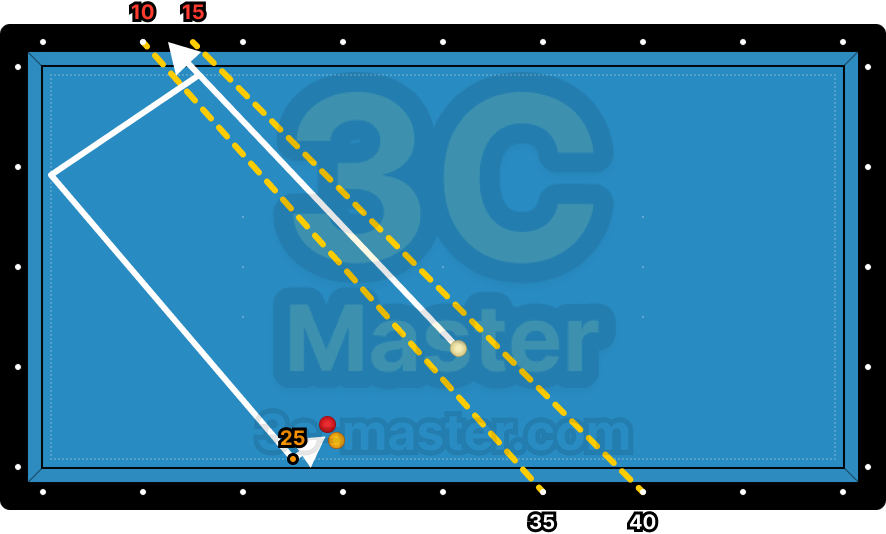
빈쿠션
3뱅크샷에 응용한 형태입니다.
3쿠션 지점 25포인트를 확인하고, 내 공과 가장 가까운 2개의 기준라인인 '35 - 10', '40 - 15'으로 1쿠션 목표지점을 찾은 후 해결하는 모습입니다.
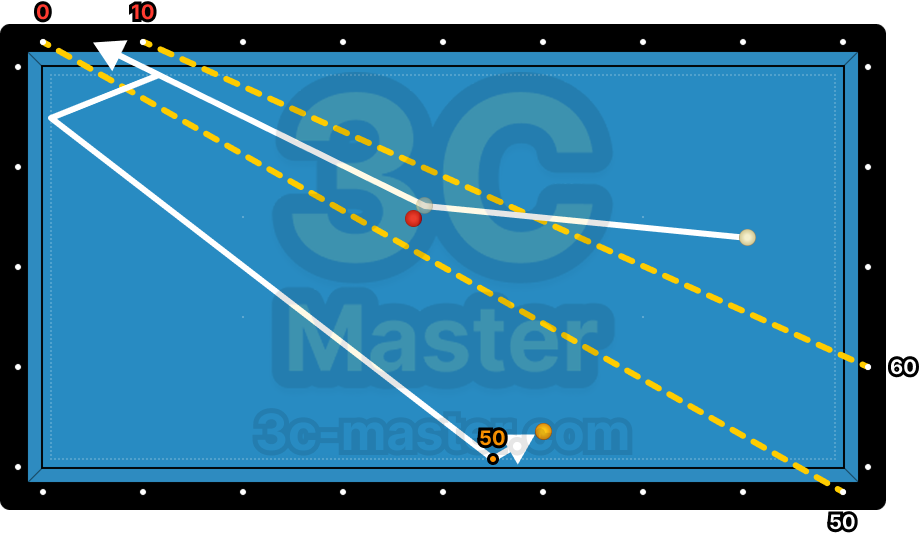
뒤돌리기
뒤돌리기 형태에 응용한 모습입니다.
목표 지점인 3쿠션값 50을 먼저 찾고, 1적구를 맞히고 나가는 형태이기 때문에 1적구 오른쪽 옆을 출발로 계산하여 3쿠션 50포인트에 도착하는 가장 가까운 기준라인을 찾습니다. '50 - 0', '60 - 10'의 두개의 기준라인을 이용하여 1쿠션 지점을 노리고 샷을 합니다.
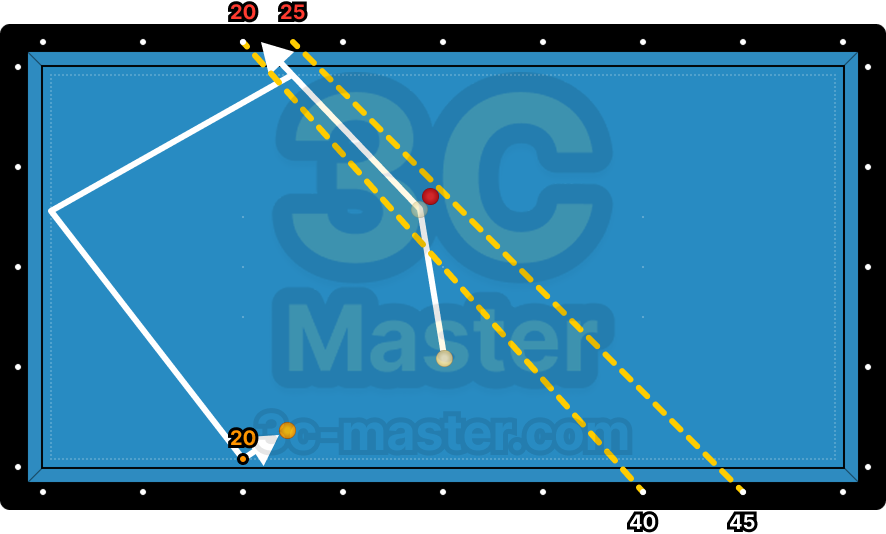
옆돌리기
옆돌리기 형태에 응용한 모습입니다.
목표 지점인 3쿠션값 20을 먼저 찾고, 1적구를 맞히고 나가는 형태이기 때문에 1적구 오른쪽 옆을 출발로 계산하여 3쿠션 50포인트에 도착하는 가장 가까운 기준라인을 찾습니다. '50 - 0', '60 - 10'의 두개의 기준라인을 이용하여 1쿠션 지점을 노리고 샷을 합니다.
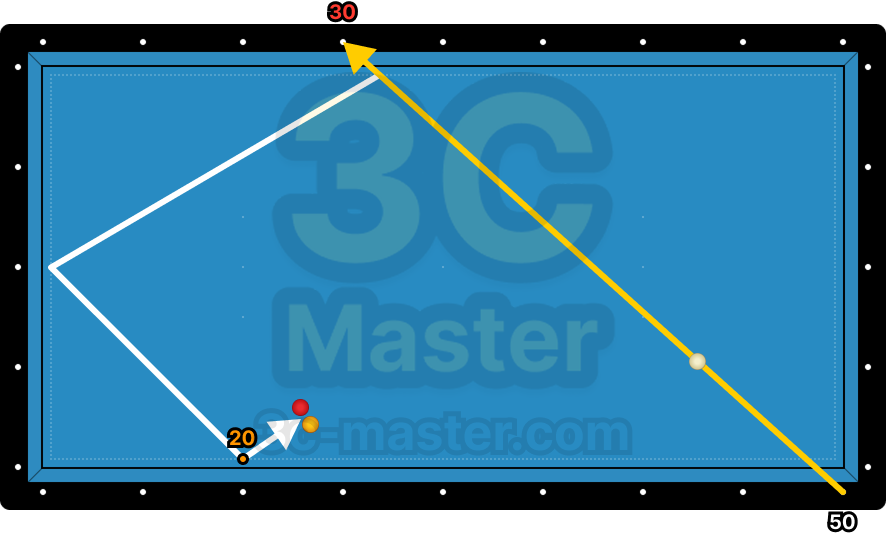
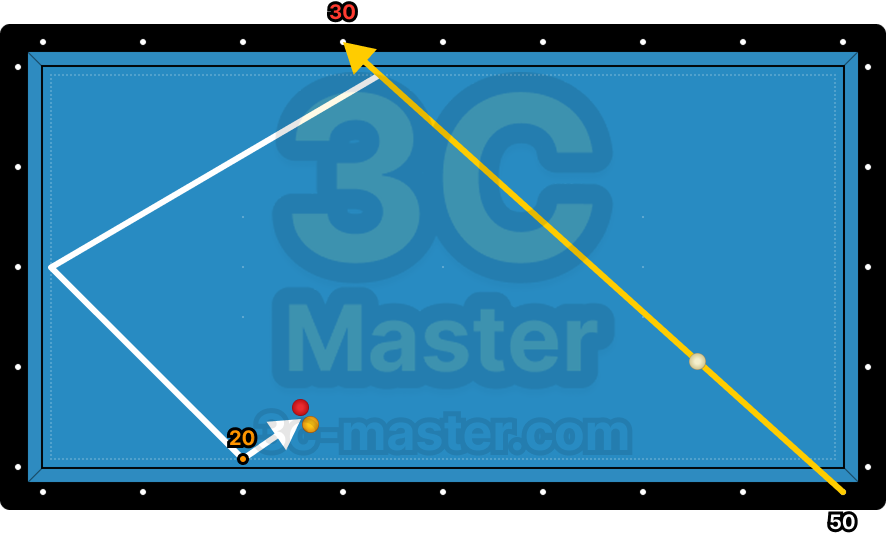
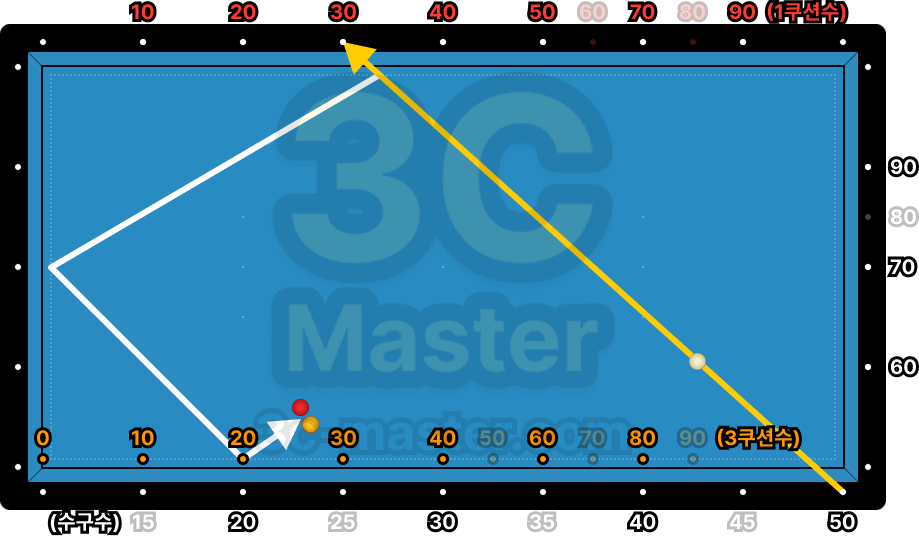
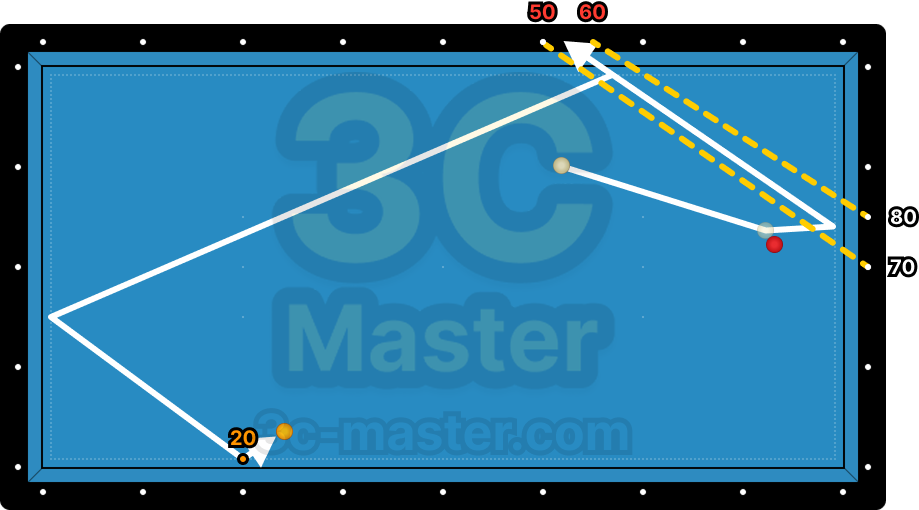
앞돌리기
앞돌리기 형태에 응용한 모습입니다.
3쿠션 지점은 20입니다. 1적구를 맞추고 2쿠션으로 진행하는 선이 파이브앤하프 시스템에서 20을 형성하는 선을 찾으면, 70 - 50, 80 - 60임을 알 수 있습니다. 해당 라인을 기준으로 내 공이 진행되도록 샷을 합니다.
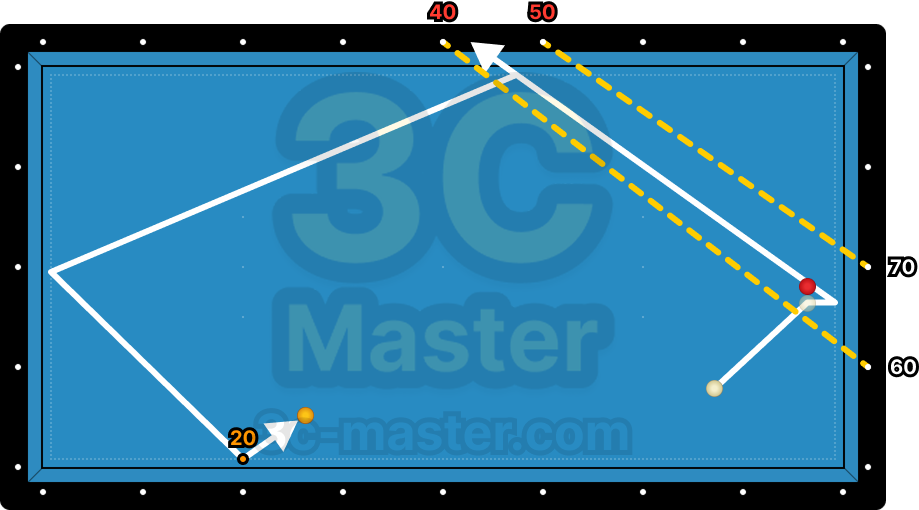
비껴치기
앞돌리기 형태에 응용한 모습입니다.
앞 선 앞돌리기형태와 비슷한 설게 방식을 사용합니다. 3쿠션 지점 20을 찾고, 1, 2쿠션의 진행라인이 20을 형성하는 선을 찾습니다. 60 - 40, 70 - 50임을 알 수 있습니다. 해당 기준선을 기반으로 내 공이 진행되도록 샷을 합니다.
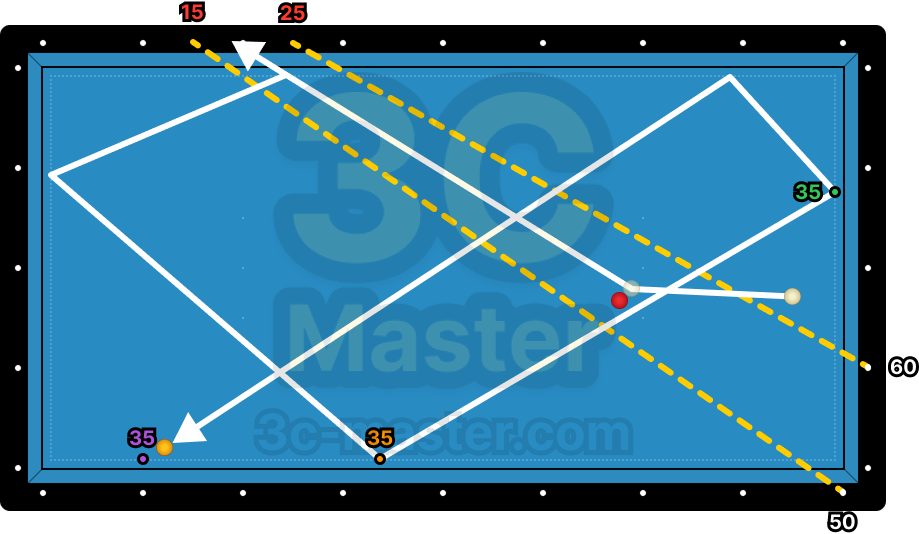
대회전
앞돌리기 형태에 응용한 모습입니다.
6쿠션의 값을 먼저 확인 합니다. 4쿠션 35라인의 연장선임을 알 수 있습니다. 4쿠션 35라인에 도착할 수 있는 값을 찾고, 내 공의 출발위치에 따라 보정 후 샷을 합니다.